
คำอธิบาย
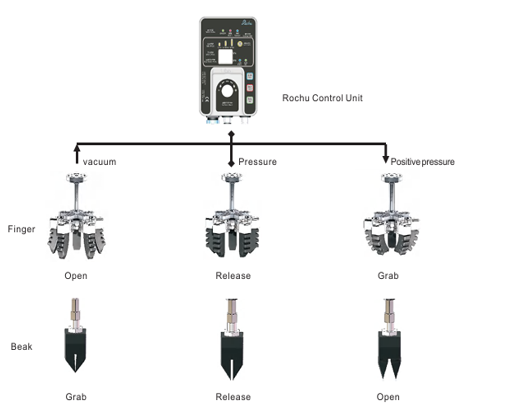
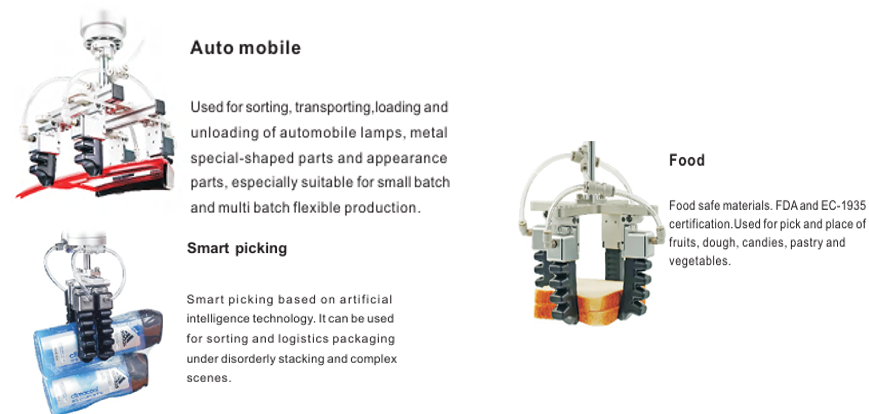
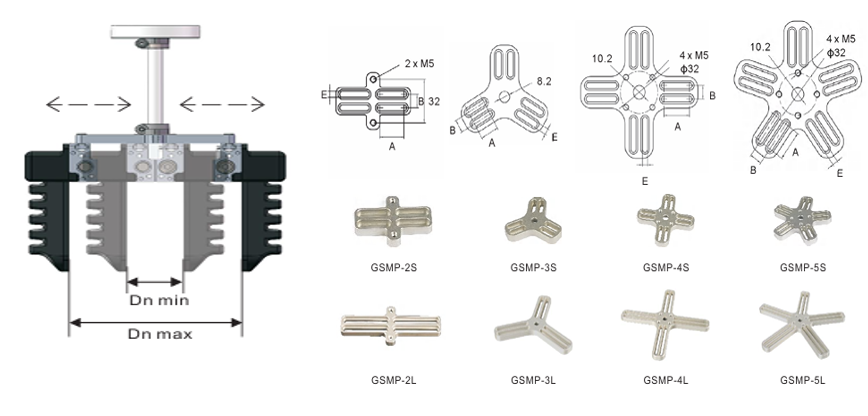
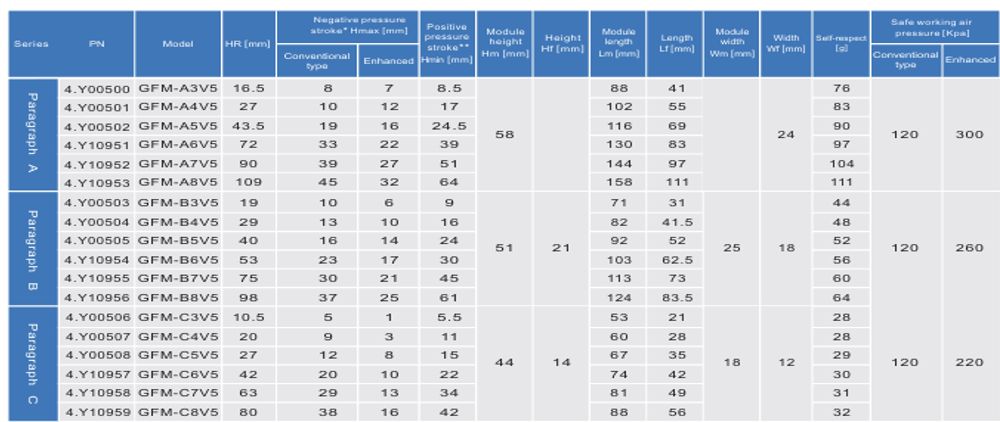
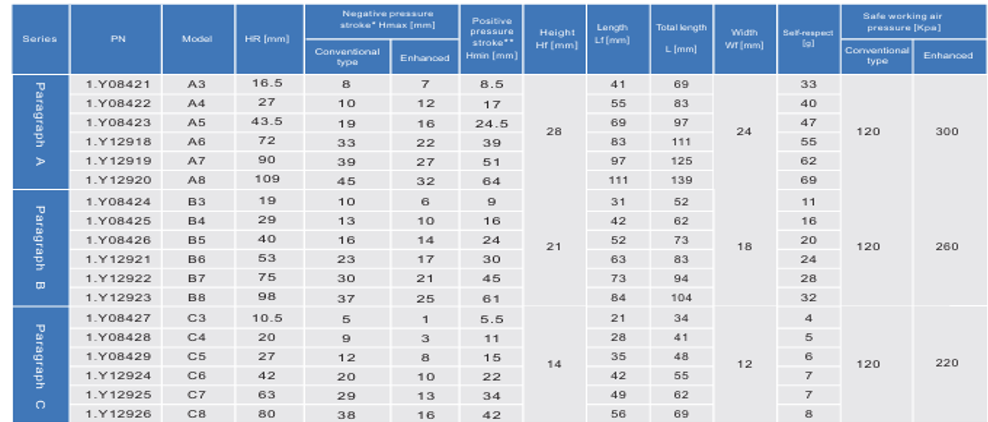
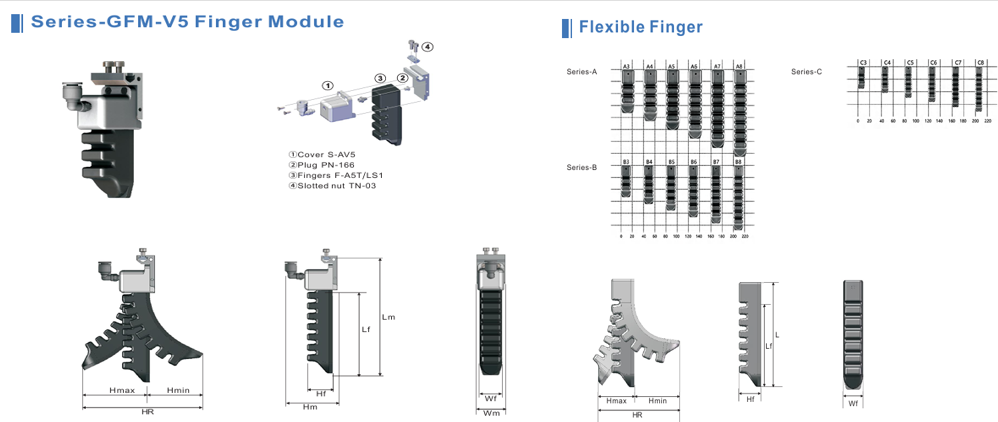
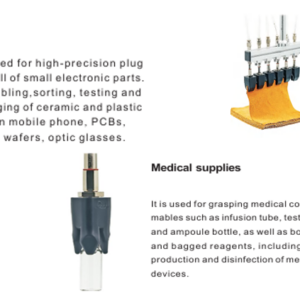
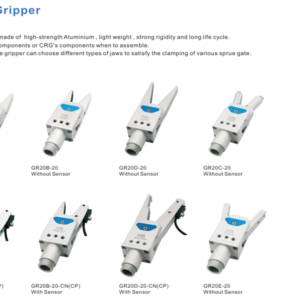
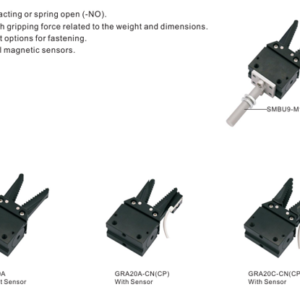
Rochu Gripper ปากจับแบบนิ้วจับหรือ แบบหนวดปลาหมึก เป็นรูปแบบการจับงานที่พัฒนามาจากการ จับยึดของปลาหมึก หรือการงอนิ้วมือเพื่อรัดวัตถุ ให้แน่น โดยการออกแบบ จะใช้แรงดันลมอัดและแรงดูดสูญญากาศ เพื่อทำให้ ปากจับ งอเข้ารัดชิ้นงานหรือ ดัดดออกเพื่อขยายรัดชิ้นงาน โดย มีชนิดของปากจับ อยู่สองแบบ คือ แบบ Finger & Beakสามารถนำไปหยิบจับชิ้นงานที่มีรูปทรงไม่สมมาตร มีพื้นผิวบอบบบาง วัสดุที่ ปากจับประเภทปกติไม่สามารถหยิบจับได้ แรงบีบจับสมารถควบคุมได้ มีหลากหลายรูปแบบหน้าตาและมีขนาดให้เลือกมาก ขึ้นอยู่กับรูปทรงและพื้นผิวที่เราต้องการนำไปใช้
ขอใบเสนอราคา
รีวิว
ยังไม่มีบทวิจารณ์